Determining the Backward Scattering Coefficient with Fixed-Angle Backscattering Sensors—Revisited
David R. Dana and Robert A. Maffione, HOBI Labs, Inc.
Adapted from a Poster Presented at Ocean Optics XVI (PDF version)
Santa Fe New Mexico, November 18-22, 2002
We review methods of estimating the backward scattering coefficient bb from measurements of the volume scattering function from fixed-angle sensors. We show that the reflecting-plate method is the most reliable way to accurately calibrate VSF instruments, single- or multi-angle. We show new calculations of the VSF and, most important, new measurements of the VSF in the back hemisphere made with the HOBI Labs' HydroBeta, to show revised estimates of the optimum coefficients for estimating bb from measurements of the VSF. We also discuss practical sensors' response to volume scattering and how it differs from the ideal single-angle response that is sometimes assumed.
Scattering is one of the two fundamental processes governing light propagation in the ocean (the other being absorption). While the amount of light scattered in backward directions (that is, deviated more than 90° from its original direction of propagation), is normally a very small fraction of the total scattered light, it is nevertheless important to a variety of applications. For example, satellite sensors viewing the ocean essentially record images of backscattered light. Interpreting these images requires understanding how the properties of seawater and its constituents relate to backscattering.
Scattering is rigorously described by the volume scattering function (VSF), β(λ,ψ), where λ is wavelength and ψ is the scattering angle with respect to the unscattered axis of propagation. While a complete description of backscattering requires measurement of the VSF over the range 90° < ψ < 180°, the difficulty of such measurements has historically led to sensors that measure the VSF at a fixed nominal angle. Further, these measurements are often used as the basis for estimating the backscattering coefficient bb.
Modern sensors for measuring the volume scattering function (VSF) at a fixed angle in the backward scattering direction were first developed in the early 1980's at SRI International.[1] At the time, considerable thought and debate were devoted to methods for calibrating the instruments to provide an absolute measurement of the VSF. The idea of measuring the scattering by spherical particles, for which the resulting VSF could be calculated from electromagnetic theory (so-called Mie theory), and then relating the scattering signal to the calculated VSF, was rejected for several important reasons. Principally, this method requires a priori knowledge of the sensor's relative response throughout its scattering volume, and it was recognized that this could not be accurately calculated from a simple analysis of the optical geometry.
The method that was eventually developed was to measure the sensor's response to a diffusely reflecting plate with a known surface scattering function. This measurement, made across the entire scattering volume, provides an absolute calibration in units of the VSF (m-1 sr-1).
In the early 1990's, when the authors developed the first multispectral backscattering sensors, they refined this calibration method and extended it to provide an estimate of the backscattering coefficient following a conjecture by Oishi[2].
Figure 1 shows the optical geometry of a HOBI Labs HydroScat fixed-angle backscattering sensor, although this discussion covers any sensor with the same basic configuration. A source emits a diverging beam of light into the water at an angle. A receiver whose field of view intersects the light beam views light scattered at certain angles from the intersection volume. It is possible to make backscattering sensors with many different combinations of angle and divergence for the source beam and receiver field of view. In any case, the intersection volume is a complicated three-dimensional shape, and its boundaries are not as sharply defined as implied by the illustration. Indeed, the boundaries are ill-defined and impossible to model accurately.
The signal received by the sensor is made up of scattered light from throughout the intersection volume, and the amount of signal received from a hypothetical individual scatterer varies depending on its location within the volume. While it is possible to construct a geometric model of the beam, field of view, and other components of the system, such models rely on numerous assumptions and approximations.
Turbidimeters and other similar sensors are often calibrated by immersion in a standard scattering solution. However, preparing a solution suitable for an absolute calibration is difficult. Plastic or glass microspheres, which are a common basis for such solutions, tend to both settle out of suspension and aggregate, causing errors in both the measured concentration and in the particle size distribution. Monodisperse solutions have ripples in their VSFs that can make the measurement more sensitive to variations in the angular weighting of the sensor response. And finally, any such procedure still requires complete and accurate knowledge of the sensor?s spatial weighting.
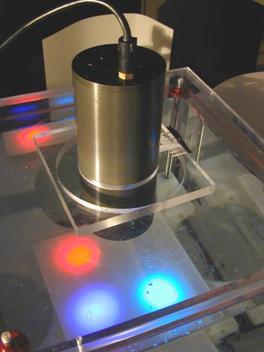
In 1991 the authors first presented a calibration procedure based on direct measurements of the sensor response,[3] avoiding the pitfalls of modeling and using a solution of scatterers as a calibration reference. This procedure is described in complete and rigorous detail by Maffione and Dana[4]. The sensor response is characterized by moving a diffusely reflecting target throughout the volume of intersection between the receiver field of view and the LED beam. This requires only a simple mechanical fixture for moving the target known distances, and yields a weighting function, W(z), that describes the response at each distance z along the axis of motion of the target. Figure 2 shows a HydroScat sensor being calibrated in this manner.
Maffione and Dana[4] show that

where S is the output signal of the sensor,
ρ is the reflectivity of the calibration target, and σ(Kbb) is a function that compensates for the effect of water attenuation on light as it travels to and from the sample volume. This function also be rigorously calculated from W(z). The angle of the measurement is denoted ψ* to signify that it is a ?centroid? angle that incorporates a range of angles over which the sensor responds to scattering.
Figure 3 shows measured W(z) functions from a HOBI Labs HydroScat-4, a four-wavelength backscattering sensor. In this graph the distance z from the sensor is converted to a mean scattering angle corresponding to each distance from the sensor. Although all four channels (i.e., wavelengths) have identical optics, there are differences in their optical responses, or weighting functions W(z), caused by a variety factors, the largest of which tends to be the light-source (LED) output geometry. We therefore measure this response curve for every channel and for every instrument. An analytical approach would necessarily assign one response function for all sensors.
In many optical applications, backscattering is most usefully characterized by the backscattering coefficient bb, which is defined by:
Applying the integral mean value theorem, this can be restated as :

where χ takes on the value that makes this equality true for each angle y. Solving this equation for χ gives
This expression explicitly shows how c depends on the shape of the VSF, β(ψ).
Oishi[2], who formulated the problem in somewhat different terms, essentially showed from an analysis of measured and modeled VSF?s that χ varied little from 120 to 150 degrees, with the smallest variation at 120 degrees. Maffione and Dana[4] reformulated Oishi?s analysis and defined the variable χ = bb/2πβ(ψ) to characterize the relationship between the VSF at a single angle and the backscattering coefficient. Analysis of the value and variability of χ at various angles by Maffione and Dana showed that the angle of 120° proposed by Oishi is not necessarily optimum when taking into account the wide-angle response of backscattering sensors. But the main import of their analysis was that the variability of χ over the range of angles from 120 to 160 degrees was minimal and a single value of χ could be used with a standard error of less than 10%.
Figure 4 shows χ functions calculated from electromagnetic theory. These new calculations are improved over previous calculations of this type because they account for a wider, more realistic range of particle sizes that affect the VSF, and include a more sophisticated integral expansion of the particle size distribution. These results again confirm Maffione and Dana?s conclusions for χ, including its magnitude and variability, contrary to a recent paper by Boss and Pegau[5].
Figure 5 shows VSF?s measured with the HOBI Labs? HydroBeta[6], a new instrument that measures the VSF in situ. Although the HydroBeta is a multi-angle VSF sensor, its calibration is performed in a similar manner as the HydroScats, using a diffusely reflecting (and transmitting) plaque. The measurements shown here were collected in October, 2002, in Monterey Bay, California. These VSF data have pure seawater scattering subtracted in order to investigate the scattering by the suspended particles. Monterey Bay encompasses a wide range of water types, from river outflows and shallow, turbulent near-shore areas, to waters upwelling from the deep ocean, to clear oceanic waters. The latter are found within a deep submarine canyon that bisects the Bay. On this deployment, the variety of optical properties was further enhanced by a large ?red tide? bloom in the Soquel Cove area of the Bay.
Figure 6 shows χ versus angle as calculated from the measured HydroBeta VSF?s shown in Figure 5. It should be understood that these χ values correspond to VSF?s of suspended particles and does not include the scattering by pure water or seawater. In other words, to obtain the total backscattering coefficient, one would calculate

where bb is the VSF of the suspended particles and bbw is the backscattering coefficient of pure water or pure seawater which can be obtained from Morel[7]. In this formulation, the analysis of χ for pure water scattering as presented by Boss and Pegau[5] is unnecessary.
Figure 7 shows a comparison of the averaged χ curves for the computed VSF?s using Mie theory and the measured VSF?s with HydroBeta. Also shown in the graph is the measured response curve of a HydroScat. By properly integrating the product of the sensor response with the χ curve, a ?mean? value of χ is obtained appropriate for the particular backscattering sensor. Note that the measured value of χ for the HydroScat geometry is 1.13, whereas the value obtained from Mie theory calculations, as first reported by Maffione and Dana, is 1.08. These differences, and the variability of χ, will continue to be investigated now that we have a means for routinely measuring the VSF in situ with the HOBI Labs HydroBeta.
As a final demonstration of the effectiveness of these techniques, see Figure 8. This is a typical example of a profile of spectral backscattering measured by the HydroScat-6. Among many other instruments mounted on this profiling package was the HydroBeta, which simultaneously measured the VSF, which was integrated to obtain bb at 532 nm. Note the excellent agreement of the directly integrated bb with the bb spectrum measured by the HydroScat-6.
- C.A. Moore, J.M. Wrabetz, and R.C. Honey, ?Development and Use of Towable Optical Sea Truth Instrumentation for LIDEX-83,?, Final Annual Report, SRI Project 3878, June 1984, SRI International, Menlo Park, CA.
- Oishi, T., ?Significant relationship between the backward scattering coefficient of sea water and the scatterance at 120°,? Appl. Opt., 29, 4658-4665 (1990).
- Maffione, R.A., D.R. Dana, and R.C. Honey, ?Instrument for underwater measurement of optical backscatter,? Underwater Imaging, Photography, and Visibility, R.W. Spinrad, Editor, Proc. SPIE, 1537, 173-184 (1991)
- Maffione, R.A., and D.R. Dana, ?Instruments and methods for measuring the backward-scattering coefficient of ocean waters,? Appl. Opt., 36, 6057-6067. (1997)
- Boss, E. and W.S. Pegau, ?Relationship of light scattering at an angle in the backward direction to the backscattering coefficient,? Appl. Opt., 40, 5503-5507 (2001)
- Dana, D.R. and R.A. Maffione, ?HydroBeta: a new instrument for measuring in-situ profiles of the volume scattering function from 10 to 170 degrees,? Ocean Optics XV, S.G. Ackleson, Editor, Proc. SPIE. (2000)
- Morel, A., ?Optical Properties of Pure Water and Pure Sea Water,? Optical Aspects of Oceaongraphy, N.G. Jerlov, ed., Academic, New York, 1974.